Jianxiang Zhou (周 剑翔)
Mphil student at HUKST(GZ)

My name is Jianxiang (Jason) Zhou. I am a Mphil student major in Data Science and Analytics at the Hongkong University of Science and Technology, Guangzhou HKUST(GZ), mentored by Prof. Yuxuan Liang & Prof. Xiaowen Chu. I received my B.E. in Robotics Engineering at the Southern University of Science and Technology (SUSTech), mentored by Prof. Zhenzhong Jia & Prof. Kemi Ding.
Currently I’m interested in spatiol-temporal LLMs and urban computing, looking forward to a future of an efficent and satisfactory samrt city for human society. I am a self-motivated and diligent student, and coming from a humble family, I passed through my undergradute study without any financial support from my parents.
Working Experiences
| | |
| 2025/07 - Present | Algorithm Intern @ Wechat/Tencent, Guangzhou, China. |
|---|---|
| | |
| 2025/05 - 2025/07 | Algorithm Intern @ Bytedance, Hangzhou, China. |
| | |
| 2024/11 - 2025/02 | Algorithm Intern @ Zhipu AI, Shenzhen, China. |
| | |
| 2024/06 - 2024/10 | Research Intern @ Cainiao Group, Hangzhou, China. |
| | |
| 2021/06 - 2021/07 | Research Assistant @ UBTECH Robotics, Beijing, China. |
| | |
Education
| | |
| 2023/08 - Present | Master of Philosophy in Data Science and Analytics @ The Hong Kong University of Science and Technology (Guangzhou), China. |
|---|---|
| | |
| 2019/08 - 2023/07 | Bachelor of Engineering in Robotics @ The Southern University of Science and Technology, China. |
| | |
Selected Publications
- arXiv
- ICARM’22
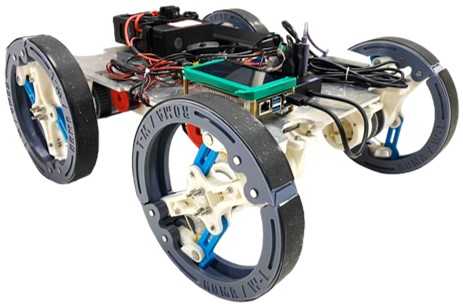 A Hybrid Wheel-Leg Transformable Robot with Minimal Actuator RealizationIn 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), 2022
A Hybrid Wheel-Leg Transformable Robot with Minimal Actuator RealizationIn 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), 2022

