Publications
* denotes equal contribution
2024
- arXiv
- arXiv
2022
- ICARM’22
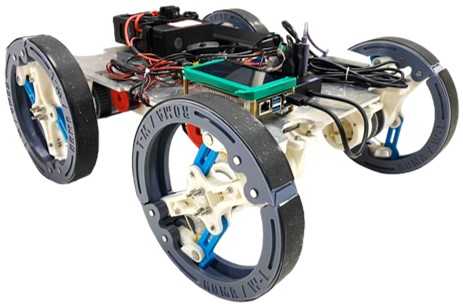 A Hybrid Wheel-Leg Transformable Robot with Minimal Actuator RealizationIn 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), 2022
A Hybrid Wheel-Leg Transformable Robot with Minimal Actuator RealizationIn 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), 2022
* denotes equal contribution


